
Jumat, 27 Desember 2013
Mungkin ada
dari teman-teman yang sudah baca Tutorial Pembuata Robot
LTC , yang
sudah diposting sebelumnya, atau ada juga yang cuma liat sekilas dan sudah
beranggapan “susah buat robot LTC ini”. Nah kami dari UKM Robotika ITS
akan mencoba merubah mindset teman-teman dengan memberi tahu point-point
penting dalam pembuatan LTC ini. Sebenarnya membuat LTC tidaklah susah, tetapi
memahaminya mungkin yang susah. Tapi tidak ada salahnya kita membuatnya
terlebih dahulu baru kemudian kita perlahan-lahan memahaminya. Nah apa yang
perlu kalian persiapkan agar dapat “membuat” Robot LTC ini :
- Mencetak PCB yang sudah didesain
- Memasang komponen pada PCB
- Membuat mekanik
- Tes Robot LTC
Sangat
mudahkan, atau cara diatas terlalu singkat mungkin. OK, aka kami sedikit
perjelas tahapannya. Yang perlu kita siapkan adalah :
1. PCB yang sudah didesain
Pembuatan PCB memang sedikit susah, karena kaliah
harus tau komponen apa yang diperguanakan, bagaimana bentuk rangkaiannya,
mendesain layout-nya (tentu dengan software khusu juga), sampai pada akhirnya
kalian harus mencetak layout dari PC/laptop kalian menjadi bentuk nyata pada
sebuah PCB. Itu beberapa step pembuatan layout PCB LTC, agak susah memang, tapi
itu akan menjadi tidak susah jika kalian sudah memiliki layout yang siap cetak.

Layout Body
dan Sensor
Gambar di atas merukapakan layotu yang harus
kalian cetak, ada dibeberapa tempat yang menyediakan jasa mencetak PCB sesuai
dengan desain yang kita inginkan. Untuk di daerah Surabaya kalian bisa mencoba
mencari di “Medokan Semampir blok H/10” atau
mungkin di tempat-tempat lainnya yang kalian ketahui. Setelah PCB kalian jadi,
jangan lupa untuk memberi lubang pada bagaian yang sudah diberi tanda
(lubang-lubang pada ujung layout). Cara melubanginya juga tidak sulit kalian
cukup menggunakan bor kecil yang dapat kalian beli di toko-toko komponen
terdekat dengan harga yang tidak terlalu mahal.

Mini Drill
2. Memasang Komponen pada PCB
Setelah PCB
dicetak dan diberilubang, kalian bisa langsung memasang komponen-komponen yang
ada pada list. Kemudian pasang sesuai dengan layoutnya, seperti ini :
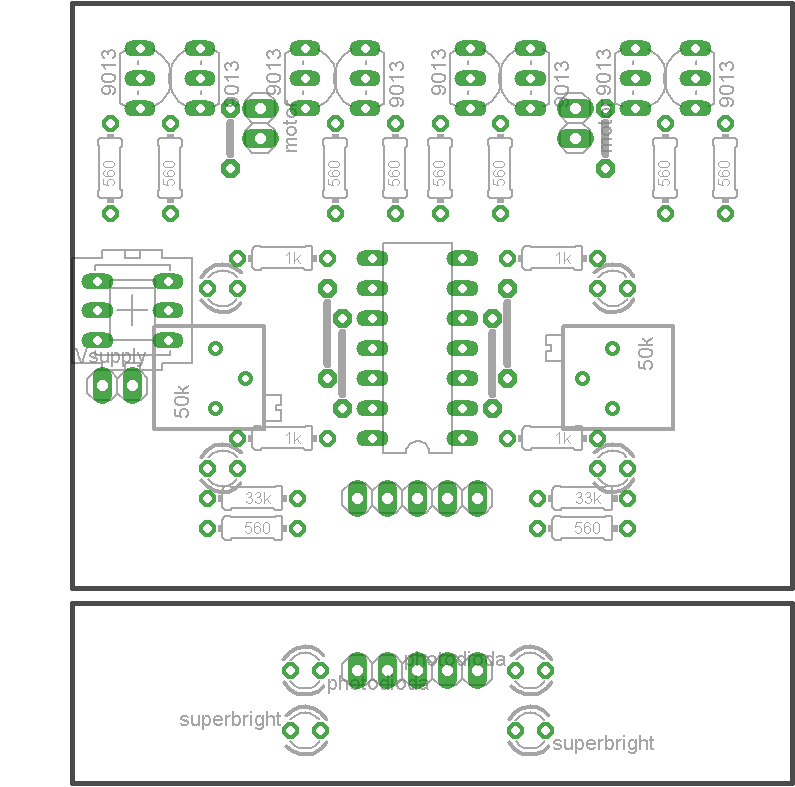
Setelah dipasang sesuai dengan gambar di atas,
kemudian solder komponen tersebut. Saat menyolder komponen jangan terlalu
banyak menggunakan timah, gunkan timah secukupnya, jika timah terlalu banyak
itu akan menjadi penghambat arus dan menjadi salah satu masalah ketika uji coba
robot. JIka sudah terlanjur atau timah yang dipergunakan tidak sengaja
kebanyakan, kalian bisa menghilangkan timah tersebut dengan menggunkan alat
ini,
Alat ini dapat menghisap timah, caranya : Tekan tombol
kuning pada bagian atas alat hisap timah sampai ke bawah. Kemudian panaskan
timah yang ada pada pcb yang akan dihisap sampai meleleh. Setelah meleleh,
dekatkan alat penghisap timah pada timah yang sudah meleleh tersebut, tekan
tombol kuning pada bagian tengah alat. Maka timah akan terhisap ke dalam alat
hisap timah.
Setelah semua komponen dipasang, cek kembali apakah
semua komponen sudah terpasang dengan benar, dan pastikan tidak ada yang short.
Short disini maksudnya, pastikan komponen tidak terhubung dengan komponen yang
tidak seharusnya terhubung. Jadi pastikan komponen terhubung degan pasangan
yang sudah di desain pada pcb.
3. Membuat Mekanik
Pembuatan mekanik tidak sesulit kedengarannya, kalian
cukup membeli mainan mobil-mobilan anak kecil dan membongkarnya. Kenapa harus
mobil-mobilan ? Karena yang akan kita cari adalah gear box yang terdapat dalam
mainan tersebut. Tidak perlu mainnan yang mahal, kalian dapat membeli mainan
seperti pada gambar di bawah dengan harga Rp 10.000-Rp 15.000, untuk daerah
Surabaya kalian dapat membeli di sekitar daerah Mulyosari, di sana terdapat
toko mainan yang banyak menjual mainan mobil-mobilan ini. Setelah membeli
mainan ini, bongkar capnya dan ambil gear box-nya. Pada mainan gear boxnya
terhubung dengan 2 roda, nah kalian cukup memotong gear box tersebut menjadi
dua bagaian, sehingga kedua roda terpisah dan kalian mendapatkan 2 buah gear
box untuk robot kalian.


Pada mainan tersebut terdapat sebuah motor, tips dari
kami, kalian tidak perlu menggunakan motor tersebut lebih baik kalian membeli 2
buah motor baru yang memiliki tegangan yang sama, sehingga laju motor kalian
nantinya akan sama. Dua buah motor tersebut kalian hubungkan dengan gear box
yang telah kalian persiapkan.
Nah sekarang kalian sudah mempunyai PCB yang sudah
dipasangi komponen,dan motor beserta gear box-nya. Tips pembuatan mekanik dari
kami, kalian bisa menggabungkan atau menempelkan PCB tersebut dengan box atau
kotak baterai yang kalian pergunakan, tapi pastikan PCB tersbut sudah berjalan
dengan benar, jadi ketika kalian sudah menempelkan dengan kotak baterai, tidak
perlu dibongkar lagi. Kemudian kotak baterai bagian bawah ditempelkan dengan
kedua motor dan gearbox kalian. Nah untuk bagain sensor bisa dihubungkan dengan
kotak baterai dan motor dengan menggunakan akrilik, tapi akrilik cukup mahal,
jadi saran kami kalian bisa menggunakan bahan-bahan bekas kalian , seperti sisa
PCB, triplek, dll. Setelah semua tersambung pastikan terdapat ruang di depan
sensor untuk meletakan roda bebas. Roda bebas ini dapat kalian beli di toko
komponen (di daerah gebang , toko XP robotic) atau toko-toko yang lain, atau
jika kalian memiliki fresh c*re bekas, kalian dapat menggunakan bagian atasnya
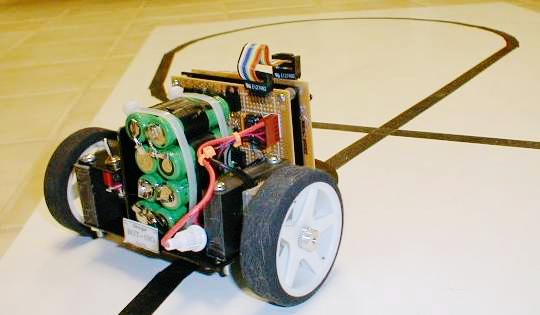
yang seperti roll on. Nah setelah jadi mungkin akan seperti ini


Tapi PCB atau rangkaian gambar di atas tidak seperti
PCB yang kita buat, jadi mungkin akan sedikit berbeda, tapi secara garis besar
kalian dapat membuat mekanik seperti ini.
NB: untuk menempel atau menyambungkan kalian dapat
menggunakan lem tembak atau lem lilin, seperti ini :

4. Test Robot LTC
Ok, jika
sudah semau step kalian jalankan, maka waktunya test drive. Jika kalian
mengalami kesulitan sewaktu melakukan uji coba, silahkan datang ke UKM Robotika
ITS, sebisa mungkin akan kami bantu. Selamat Mencoba.
Sumber : ITS








Ditulis Oleh : Andi Kurniawan ~ Combat7thGen
 Anda sedang membaca artikel tentang Line Follower Analog. Oleh Admin Andi Kurniawan, Sobat diperbolehkan mengcopy paste atau menyebar-luaskan artikel ini, namun jangan lupa untuk meletakkan link dibawah ini sebagai sumbernya
Anda sedang membaca artikel tentang Line Follower Analog. Oleh Admin Andi Kurniawan, Sobat diperbolehkan mengcopy paste atau menyebar-luaskan artikel ini, namun jangan lupa untuk meletakkan link dibawah ini sebagai sumbernya



Gan minta skema rangkaian agar gc kebalik masang komponen.a gan
BalasHapussetonugroho644@gmail.com
minta komponen nya mas, bingun ??
BalasHapusDaftar komponen nya gan ..mash kurang jelas maksh .. bisa tolong di gmail ke anggaboyz87@gmail.com .. trmksh
BalasHapusDaftar komponen nya gan ..mash kurang jelas maksh .. bisa tolong di gmail ke anggaboyz87@gmail.com .. trmksh
BalasHapusApakah sudah di uji coba
BalasHapusMinta daftar komponen kirem ke prayogaadi855@gmail.com
BalasHapuskomponennya apa aja ya?
BalasHapus